A Robotic Rehearsal for Interplanetary Exploration (cont.)Page 2/3 - Posted July12, 2016
“What’s unique about ARTEMIS is that it is a relatively long-range vehicle,” Schmidt said. “What the instrument package does for us is give us a kind of robot oceanographer, as well as some information about biology in the area.” 
Photo Credit: Mike Lucibella
Mark Scully (far left), Kristof Richmond and Evan Clark check over some of the thousands of lines of code that go into running the robot.
One of the main goals of the project is to help calibrate aerial ice-penetrating surveying technology for a Europa mission that’s already in development. While swimming long distances under the ice, the robot charted a detailed picture of how thick the ice shelf is, and how well researchers had been able to measure it from the air. “We have sonars that are mapping the topographies of the ice,” Schmidt said. “That data is going to be used to compare to ice penetrating radar of the same environment so we can take what we can do here, and map it to radar data all over the continent, and eventually on Europa.” NASA plans to launch a probe in the early 2020s to fly around the icy moon. One of the instruments slated for the mission is an ice-penetrating radar to create a cross section of the moon’s icy crust. Dubbed the Europa Multiple-Flyby Mission, the probe will chart the surface and underside of Europa’s ice, looking for spots thin enough that a future lander could drill through the ice to the liquid ocean below. Part of the SIMPLE team flew a similar ice-penetrating radar over the Ross Ice Shelf in the 2013 and 2014 seasons, led by the University of Texas Institute for Geophysics. ARTEMIS then used sonar waves to map the same spot of the shelf from the underside to see how accurate those radar readings are. 
Photo Credit: Mike Lucibella
Vickie Siegel looks up from the hole drilled in the sea ice as ARTEMIS is lowered into the water below.
“The data we’re collecting underneath this radar target area are going to provide ground truth for ice thickness so that the radar folks can tune the algorithms for this radar that’s going to Europa,” Kimball said. The sonar echoes received by the underwater robot appear as a forest of red dots against a black background on one of the screens monitoring the progress of the robot. As the sub moves through the water, more dots appear, resolving themselves into detailed contours of the icescape that covers the ocean. While it swims under the ice, the sub collects data about the conditions of the water itself. Onboard instruments are constantly gauging how deep the robot is under the surface and measuring the temperature of the water and its salinity. “There’s a whole range of different water masses, and you can look at how those are interacting underneath,” Schmidt said “You can tell if you have ocean water that’s just ocean water because it’s a certain salinity, or if you have mixed ice melt in there, that’s a different salinity or if it’s bottom water versus shelf water versus Antarctic current water.” 
Photo Credit: Mike Lucibella
Vickie Siegel connects a wire to the light-up boom that the robot homes in on at the end of each of its missions.

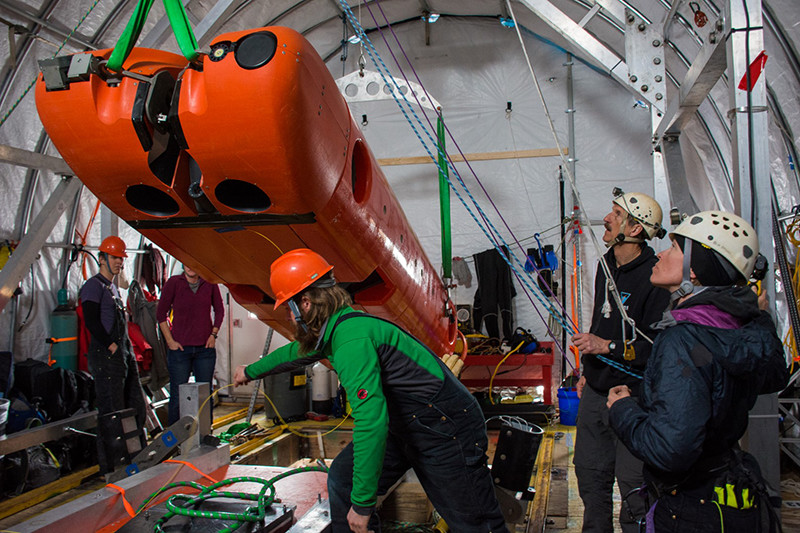
Photo Credit: Mike Lucibella
Right after launch, keeping the cluster of wires, cables and rope attached to the robot from getting tangled is an important job for Bill Stone (left), Britney Schmidt, Josh Moor Peter Doran and Kristof Richmond.
While the sub is in the water, these results are projected live onto a screen over the bank of computers the researchers are using to steer the sub. On a nearby screen, small sea creatures occasionally swim in front of the camera. Should a chance meeting like that happen in the oceans of Europa, the question about whether life exists beyond of Earth would be settled in an instant. But astrobiologists aren’t banking on such a fortuitous encounter, so they are working to develop ways for a future probe to detect signs of life that are more difficult to see. “It would go there to search for life, but there is no magical ‘search for life’ sensor that you can buy and put on a robot,” Kimball said. “One of the big questions is what sensors would you put on such a robot and how would you interpret the data from those sensors to know whether what you were seeing in this environment was life or evidence of life.” One promising tool they tested out was a custom-built protein fluorescence spectrometer. It scanned for protein molecules by shining a carefully calibrated light into the ice and looking for the tell-tale glow that certain proteins emit as a result. “Proteins are higher order structures usually created in biochemical reactions and that’s why they’re useful. If you can see evidence that those are there, than that’s suggestive of life. Its’ what we call a biomarker,” Schmidt said. “It doesn’t necessarily mean that life exists, but it means that processes relevant to life, and potentially biological in nature, have occurred.” They placed the spectrometer on the end of an extendable arm so the robot could place the sensor right against the underside of the ice. “The idea is to touch the instrument to the ice in order to measure what’s living right on the surface of the ice or right inside of the ice,” Kimball said. “By touching it right to the ice you don’t have any sea water in between. Sea water, here on Earth, is full of proteins that could potentially swamp the signal.” |
"News about the USAP, the Ice, and the People"

For USAP Participants |
For The Public |
For Researchers and EducatorsContact UsNational Science FoundationOffice of Polar Programs Geosciences Directorate 2415 Eisenhower Avenue, Suite W7100 Alexandria, VA 22314 Sign up for the NSF Office of Polar Programs newsletter and events. Feedback Form |