|
Read a transcript of this video |
Video Information |
Story by Michael Lucibella, Produced by Ralph Maestas
A Robotic Rehearsal for Interplanetary ExplorationAn Antarctic robot lays the groundwork for future space missions to Jupiter’s icy moon Europa.Posted July12, 2016
The researchers working on the project known as SIMPLE will tell you that it’s anything but. 
Photo Credit: Mike Lucibella
Vickie Siegel and Josh Moor prepare the underwater autonomous vehicle ARTEMIS to dive under the ice off the coast of McMurdo Station.
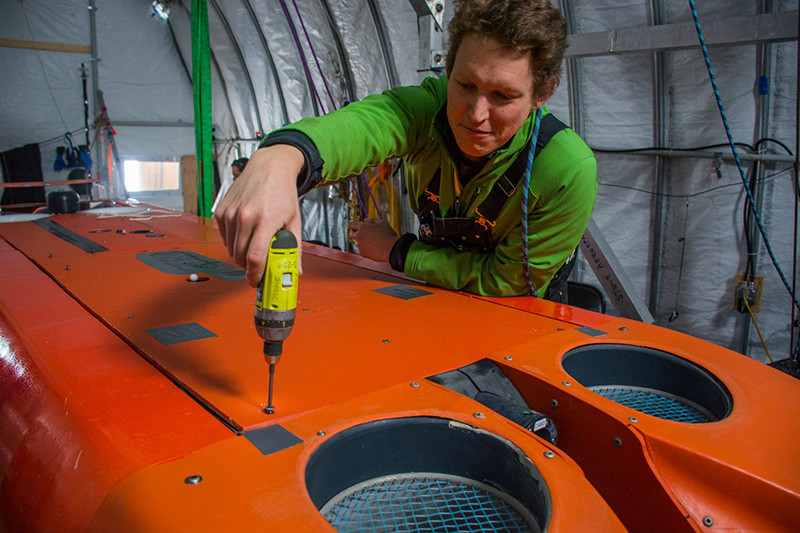
Photo Credit: Mike Lucibella
Luke Winslow tightens down the top panel on ARTEMIS before a launch.
It is no small undertaking to design and build a 25-foot-long underwater robot, launch it through a narrow hole drilled through 20 feet of sea ice, allow it to maneuver it autonomously through several kilometers of Antarctic Ocean for hours at a time and program it to pilot itself back to within a few feet of where it started. The simple part is that it at least takes place on planet Earth. Though still many years away from their ultimate goal, the team members are using their underwater robot named ARTEMIS to develop the technology that they hope will one day explore the vast ocean covering Jupiter’s icy moon Europa. “The idea here is to get in on the ground level and push the technology forward,” said Britney Schmidt, a professor of planetary science at the Georgia Institute of Technology (Georgia Tech) and principal investigator for the project. “ARTEMIS itself won’t be going to Europa but the technologies and the ideas and the way that we’ve used them and some of the engineering decisions and some of the science hypotheses, those are what will be migrated forward into future hopefully underwater exploration in Europa.” ARTEMIS is the latest in a series of robots that’s part of the Sub-ice Investigation of Marine and Planetary-analog Ecosystems (SIMPLE) project. It’s a NASA-funded effort to build machines that can explore the harsh environments on Earth that most closely mimic those of the icy worlds of the outer solar system. The National Science Foundation, which manages the U.S. Antarctic Program, is supporting the Antarctic field operations of the project. Europa is near the top of a short list of spots in the solar system that could realistically harbor life beyond Earth. It’s Jupiter’s fourth largest moon and completely covered in an ocean up to 60 miles deep. 
Photo Credit: Mike Lucibella
Britney Schmidt (foreground) and Bill Stone help guide the robot into position for launch.
Jupiter and its moons are more than five times farther away from the sun than Earth, and at that distance, temperatures along Europa’s equator never rise above minus 250 degrees Fahrenheit. These frigid conditions freeze the top 10 to 20 miles of ocean into a thick layer of ice. Yet planetary models and flyby probes have shown that tidal forces from Jupiter’s gravitational field keep the deep interior warm enough for a liquid ocean, where scientists hope to discover extraterrestrial life. “When we think about ingredients for life and the things that we might need to host a biosphere outside of Earth, Europa kind of rises to the top because we have a big global ocean, it’s hidden by an ice shell…. [but] underneath that, it may be very Earth like,” Schmidt said. The Ross Ice Shelf near McMurdo Station is among the best terrestrial stand-ins for the Jovian moon. It’s a permanently frozen ice shelf roughly the size of Texas, more than 2,000 feet thick in places. Abutting the shelf is seasonal sea ice, which freezes during the austral winter and clears out in the late summer. It’s an ideal launch site for the robot, and these two ice coverings together make for the best place on Earth to learn more about what it takes to pilot a robot under the frozen surface of an alien ocean. Fortunately for the team, Antarctic sea ice is thinner than on Europa. They only had to drill through about 20 feet of sea ice where they set up their ‘bot camp. “Getting something to go through a drilled hole in the ice and then go off on long range missions is something that nobody has done here before,” said Bill Stone, president of Stone Aerospace, which built the robot. “It can be programmed to go along a series of directional points, wherever you want it to go. And it will execute a series of behaviors that we want it to do along the way.” Making the vehicle as autonomous as possible is a key part of the project. Remotely piloting a probe under Europa’s deep oceans from as far away as Earth is impossible. Any interplanetary ocean vehicle will need to be able to explore on its own, establish its own maps, and automatically investigate anything that looks interesting along the way. 
Photo Credit: Mike Lucibella
Vickie Siegel operates the winch that lifts up ARTEMIS and brings it to the hole drilled in the ice.
ARTEMIS is programmed with a prototype system to help develop such onboard programming. Once it enters the water, the researchers indicate a point on the map, and more than 300,000 lines of code automatically guide the robot to where it needs to go. “It is in a class of vehicles that are technically termed HROVs or Hybrid [Remote Operating Vehicles],” Stone said. “It’s a vehicle that can be both autonomous as well as being operated from a remote station like an ROV.” When it’s on manual mode, the pilot guides the robot using an X-Box video game controller. They watch its progress through the water from a live video feed carried along a 15 kilometer-long spool of fiber optic cable. The robot is part also of the design process to figure out what kinds of hardware a future interplanetary submarine might need. “The vehicle that goes to space is going to have to be much smaller and lighter than ARTEMIS,” said Peter Kimball, an engineer at Stone Aerospace. He added that on land, ARTEMIS weighed more than 2,500 pounds. “Sending something like that to Europa is completely infeasible.” The problem with designing underwater vehicles like ARETMIS is that even the addition of a small instrument comes with a big weight penalty. The larger the robot is, the more energy it takes to propel, which in turn requires bigger batteries, which adds to the overall weight, which again requires more energy to move, and on and on. Figuring out the best ways to slim down the robot’s systems and instruments will go a long way towards making future probes possible. “A big part of the data analysis here, from a technology development perspective is [determining] what do we really need? What is most important, and what can we get rid of?” Kimball said. “The smaller we make the vehicle, the smaller we can make the batteries.” For its work in the Antarctic, researchers are using the robot’s large size and long battery life to their advantage. It’s covered with numerous sensors and instruments to capture a broad range of data about the waters of McMurdo Sound. |
"News about the USAP, the Ice, and the People"

For USAP Participants |
For The Public |
For Researchers and EducatorsContact UsU.S. National Science FoundationOffice of Polar Programs Geosciences Directorate 2415 Eisenhower Avenue, Suite W7100 Alexandria, VA 22314 Sign up for the NSF Office of Polar Programs newsletter and events. Feedback Form |
