Icefin Tests the WatersAntarctica's Icy Ocean Stands in for Jupiter's Frozen Moon EuropaPosted May 7, 2019
Navigating a robot through the frozen ocean's frigid waters was all in a day's work for the RISE UP science team. 
Photo Credit: Mike Lucibella
The Icefin robot is designed to be modular. It can be broken down into small cases for shipment and transported in pieces.
From their makeshift mission control in a small fish hut, the researchers maneuvered their underwater vehicle through the seawater below. Weaving the 'bot through ice cracks and around other hazards, they explored never before seen corners underneath Antarctica's Ross Ice Shelf, Erebus Ice tongue and the adjacent sea ice. For hours at a time, they squinted at readout screens, navigating through this otherwise inaccessible marine environment. But throughout all of this, there was another far off ocean at the back of their minds, one just under the surface of a distant, frozen satellite. "What we're doing here is diving a vehicle called Icefin to study the under-ice environment, as well as to act as a test platform for technologies and instrumentation that we might one day use to explore Jupiter's moon Europa," said Britney Schmidt, a professor at Georgia Tech and principal investigator for the project. The project, known as RISE UP or the Ross Ice Shelf and Europa Underwater Probe, is part of a NASA-funded effort to explore the harsh environments on planet Earth that most closely mimic those of the icy worlds of the outer solar system. "It's kind of a two for one deal," Schmidt said. "It's trying to do as much of the science as possible in situ and learn as much as we can about this environment, as well as about what we might expect when we eventually get to Europa." In addition, the team's field work over the past two years is also allowing the team to proof the vehicle before taking a version of it to the Thwaites glacier in West Antarctica next year. There, they'll drill down through the ice and collect data from underneath the continent's fastest melting glacier, an environment that scientists know little about. "[Icefin] allows us to explore places under the ice that other robots can't really reach and it also allows us to collect a lot of scientific data that was previously extremely difficult to collect," said Daniel Dichek, a master's student at Georgia Tech and lead electrical engineer for Icefin. 
Photo Credit: Mike Lucibella
Matt Meister (left) and Francis Bryson work to assemble the Icefin robot and prep it for launch.
The National Science Foundation, which manages the U.S. Antarctic Program, is supporting the Antarctic field operations of the project. The vehicle's construction is supported through a NASA program called the Planetary Science and Technology through Analogue Research, or PSTAR. It funds scientific research in extreme environments that develops new technologies for potential future use on interplanetary exploration missions. A Submarine for SpaceEuropa is Jupiter's fourth largest moon and is covered in a 60-mile deep ocean encased underneath a thick layer of ice. Scientists think it's one of the most likely places in the solar system to find life outside of planet Earth as organisms could theoretically thrive in its subsurface ocean. Researchers hope to someday send a space probe to the frozen moon, one capable of burrowing into the ice and swimming in the ocean below. The team traveled to Antarctica because the oceans below the frozen sea ice and ice shelf are the closest analogue to the conditions in any subsurface ocean on Europa. Though there are no specific plans yet to send a lander to Europa, Schmidt and her team are developing the technology that might be used one day for such a mission. They're testing out sensors and developing instruments that could tell them a great deal about the environment below the frozen surface. "The scientific objectives are to understand the interaction between the ocean and the ice in a variety of environments here," Schmidt said. "That's a process that we think is similar at Europa as well as here so this is giving us insight into that process. It's not well known here so it allows us to do compelling new Earth science as well." A Lean Mean Diving MachineThe team spent five weeks operating their robot under the ice around McMurdo Sound, including the first dive ever underneath the Erebus ice tongue. Though the pencil-shaped robot is 12 feet long, it’s only about 9 inches in diameter, so it was able to fit in some pretty tight spaces. It's designed so it can easily fit through a hole drilled down into the ice. Though space onboard is tight, the robot is bristling with sensors to measure the conditions below the frozen surface of the ocean. Its standard compliment includes a conductivity, temperature and depth sensor (known as CTD), a turbidity detector to see how many particulates are in the water, organic matter detectors, a pH monitor, a sonar mapping system, and a device that measures what's known as the oxidation reduction potential, essentially how much dissolved oxygen is in the water column. 
Photo Credit: Mike Lucibella
Icefin has multiple bays for equipment. Visible here is the top facing camera, two parallel green lasers and four-directional sonar to help maneuver and map under the ice.
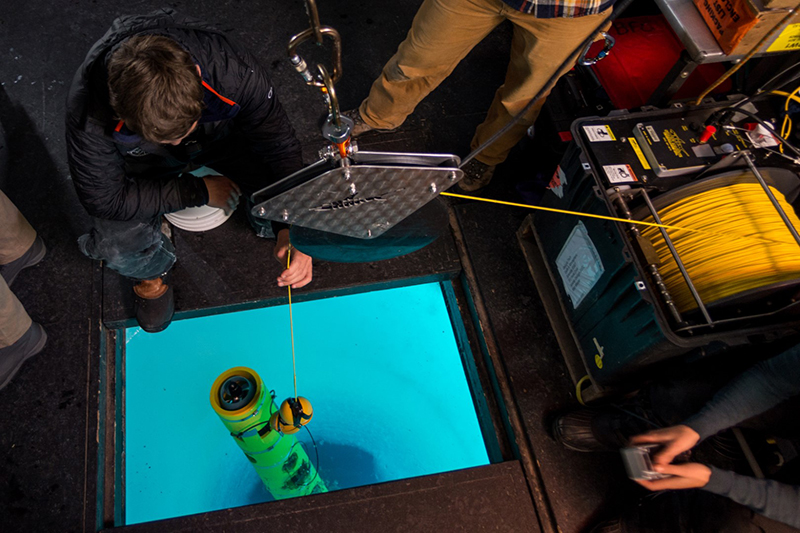
"This information gives us really useful data for ice-ocean interfaces, specifically what happens at the edge of an ice shelf when the tides change, when the seasons change and how does that affect the melty rate or the growth of the ice shelf," Dichek said. "Other questions that it allows us to answer is what exactly happens where giant glaciers or other big ice features meet the land." In addition to the dynamics of the ice, the team is also interested in understanding more about the organisms that live in the water column here on Earth. One device they're developing is a prototype cell counter to distinguish living cells from other particles in the water. In future space probes, detecting and characterizing life on a distant moon would be central to the mission, and researchers are working to better develop instruments to do so. "We also have a lot of sensors on here to do environmental characterization in order to understand what exactly is controlling who's living where in the ecosystem," Schmidt said. "That might be able to say if any of these are uniquely indicative in the environment and why things are living there, then that might be a sensor that we might one day carry to Europa." All of the data the robot collects as it swims is piped through a fiber-optic cable up to a small fish hut above the ice. There, a pilot steers the vehicle from their portable mission control using its two cameras. They're augmented by a sonar system and an altimeter that measures how far below the surface the robot is. Icefin is a hybrid autonomous vehicle, so the team can either pilot it with a remote control or program routes and waypoints for it to follow. Ultimately for some future interplanetary probe, the team will need to create a navigation system that is completely autonomous, one that can observe its environment and make decisions on its own. 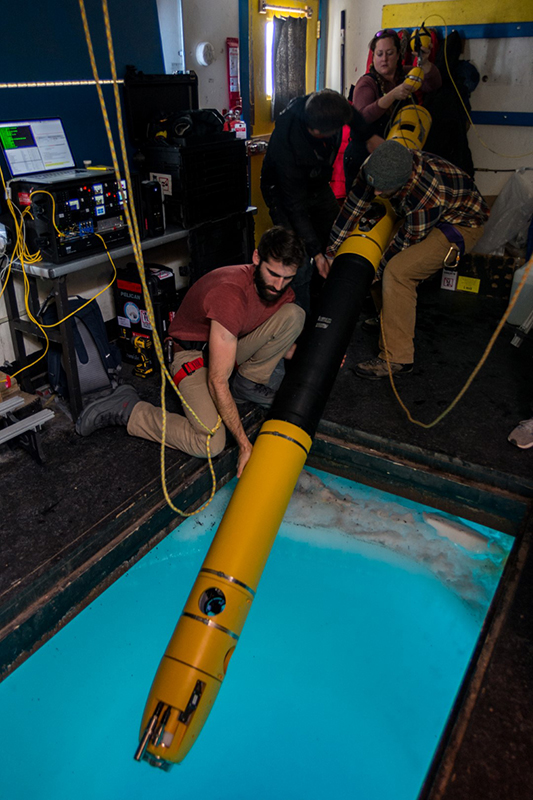
Photo Credit: Mike Lucibella
Britney Schmidt (rear) helps the rest of her team launch the fully-assembled Icefin through a hole drilled through the sea ice.
"One of the things we're trying to develop during the project is how to use multiple sensors to do better under-ice navigation and visualization," Schmidt said. "That will eventually allow it to do higher order decision making, but for now it's pretty much preprogrammed routes and knowing where it is and regulating its own thrusters to get where it's going." "Have Robot, Will Travel"One of the big innovations in Icefin is its interchangeability. It's built so researchers can easily mix and match different instruments and sensors on the robot depending on its mission. "It is modular and designed to support other scientific instruments," Dichek said. "Let's say there's a team from another university that would like to design an instrument, but can't get it down to Antarctica, or don't have experience designing it for a vehicle. We can give them a set of specifications that will allow them to essentially package their instrument and we will put it into a vessel that will fit in our vehicle and drive it to where they need it to go." The whole vehicle is likewise designed to be broken down into several parts so it can be transported to field sites easily. 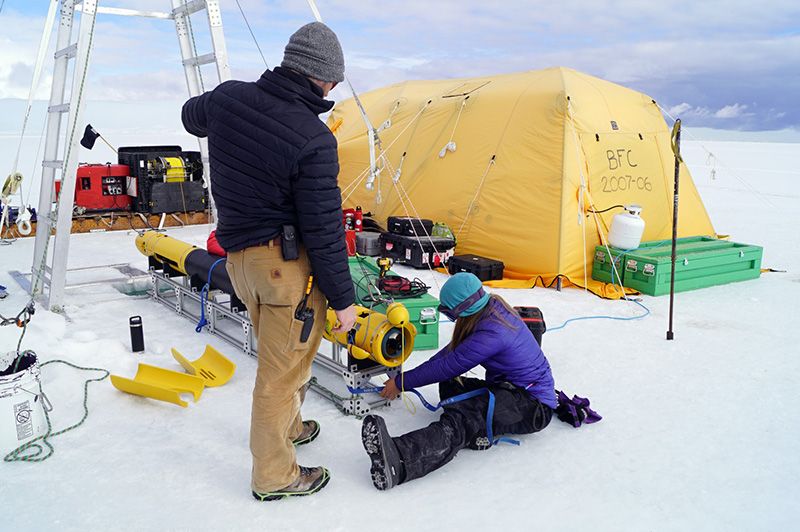
Photo Credit: Elaine Hood
At their field site near the Erebus Ice Tongue, Matt Meister (left) and Tiegan Hobbs prepare the robot to dive under the sea ice to explore under the adjacent ice tongue, a place that had never been explored before.
"The reason we wanted a modular vehicle so that we could have relatively low logistics down here," Schmidt said. "Everything on the vehicle comes apart into seven modules and those modules can be put into a pelican case and rolled on a plane or into the back of a PistenBully [tracked vehicle] or a sled and we can take it pretty much anywhere we'd like to go." This ease of transport will be especially important next year as the team is building a second robot to bring to West Antarctica as part of the multinational Thwaites Glacier effort. The Thwaites Glacier is an enormous river of ice in West Antarctica that has been rapidly losing mass and scientists worry it could collapse before the end of the century, dramatically raising sea levels around the world. Over the next four years, the United States and Britain are teaming up to send multiple research teams to study every possible aspect about the glacier to better understand if and when it might collapse. Schmidt and her team are part of one of the research groups planning to travel there next year. They're helping out the MELT team, who are studying the area under the glacier where the ice meets the ocean known as the grounding line. It’s a critical area to understand but difficult to access. As warm ocean water surges in and comes into contact with the underside of the glacier, its ice melts out from below and thins the glacier, weakening it. 
Photo Credit: Elaine Hood
Charles Ramey (left) and Justin Lawrence pilot the remote vehicle under the Erebus Ice Tongue from their portable mission control inside their tent.
"We'll be taking Icefin out with that team, drilling in the middle of Thwaites Glacier, and then also at the grounding line," Schmidt said. The team is also planning to return to the Ross Ice Shelf next year as well. They'll be linking up with Antarctica New Zealand which plans to drill a hole near the grounding line of the Kamb Ice Stream on the far side of the Ross Ice Shelf. Schmidt and her team plan on deploying one of their robots through the hole to study its grounding line. "Grounding line dynamics are one of the biggest unknowns in the climate system because we have no direct observations there," Schmidt said. "We haven't really seen the grounding line environment anywhere. That's a place where it's really controlling glacial stability." While researchers are using the robot to learn about the glaciers, they're also learning a lot from the robot itself. The vehicle was built almost entirely by students and post-doctoral students from Georgia Tech. It's a unique opportunity for early career scientists and engineers to be as deeply involved with all aspects of a project like this. "Everyone is learning and it's been such a refreshing way to work and learn new things," Schmidt said. "It's really really great and the academic environment is perfect for that." |

For USAP Participants |
For The Public |
For Researchers and EducatorsContact UsU.S. National Science FoundationOffice of Polar Programs Geosciences Directorate 2415 Eisenhower Avenue, Suite W7100 Alexandria, VA 22314 Sign up for the NSF Office of Polar Programs newsletter and events. Feedback Form |