Moon over McMurdoResearchers use ice shelf in Antarctica to prepare for Europa missionPosted November 26, 2014
Four bleary-eyed men wearing grease-smeared tan jackets or red parkas emerge from what first appears to be a leftover prop from a Mad Max film. Nine silver smokestacks tower above nine fire-engine-red hot water tanks, all bolted down to a large sled. The roving drill, as it’s known, is a bit like a giant high-pressure car wash on skis. All of its force is focused through a nozzle attached to a thousand meters of hose. It is designed to bore through thick ice when expediency is a top priority. Still, the effort to melt glacial ice takes time. Lead driller Dennis Duling and his team from the University of Nebraska-Lincoln stayed up until 1 a.m. that day to punch a hole slightly smaller than the width of a manhole cover through the McMurdo Ice Shelf, not far from White Island. 
Photo Credit: Peter Rejcek
Hot water drillers Graham Roberts, left, and Daren Blythe wrap up operations after boring 40 meters through ice and snow.
“We’re interested in this place as an analog for Europa,” says Britney Schmidt, an assistant professor in the Georgia Institute of Technology’s School of Earth and Atmospheric Sciences. She is the principal investigator on a NASA-funded astrobiology project called Sub-Ice Marine and PLanetary-analog Ecosytems (SIMPLE) It’s not the scenery on the surface of the ice that Schmidt is talking about, though it is spectacular on this nearly windless November day in the Antarctic. A plume of smoke from Erebus volcano seems to puddle in a cloud above the crater, attesting to the stillness. Pressure ridges taller than a person, where the ice has buckled skyward, are visible in the distance near White Island’s shoreline. All eyes focus instead on the borehole, which drops down about 40 meters through snow and ice into the ocean below. The interface between water and ice on the underside of the ice shelf is where Antarctica and Europa, a moon of Jupiter, intersect in terms of how conditions here may help future exploration of Jupiter’s icy moon nearly 400 million miles away. Specifically, Schmidt’s team wants to learn all it can about every possible process – chemical, physical and even biological – that occurs between the interaction of ice and water in the ocean cavity. That data will provide clues that a spacecraft could use when it probes Europa’s surface during a mission to the distant moon. Antarctica and Jupiter moon are the same but differentOne of more than 60 moons that orbit Jupiter, Europa is a leading candidate in the solar system for harboring extraterrestrial life. Information from satellites has suggested that a salty ocean exists under the moon’s ice shell, which is tens of kilometers thick. As the saying goes, where there is water, there is life. Schmidt was a co-author on a paper last year in the journal Nature Geosciences that found the subsurface ocean might have deep currents and circulation patterns that transfer heat and energy capable of sustaining life – though think microorganisms like bacteria and not almond-shaped-face aliens with flying saucers. 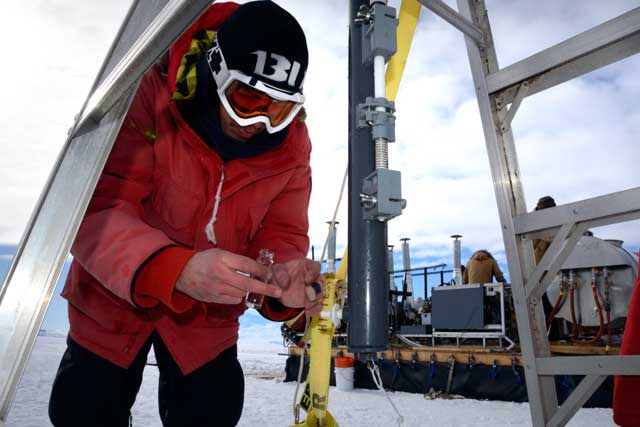
Photo Credit: Peter Rejcek
Scientist Jacob Buffo takes a water sample from an instrument sent down the borehole before SCINI was deployed.
Prominent features on the surface of Europa called chaos terrains are regions of disrupted ice that may be the result of convection in the moon’s ice shell that is accelerated by heat from the ocean. Plumes of buoyant ice are possibly rising through the ice cover, responsible for creating chaos terrains and other features. A somewhat similar process occurs on some marine-based ice shelves in Antarctica. “We think there is some ice accretion going on there,” said Schmidt, referring to the McMurdo Ice Shelf. Seafloor sponges have been found on the surface of the ice shelf, suggesting that anchor ice from the bottom of the ocean is detaching, carrying with it hitchhiking marine organisms that become glued to the bottom of the ice shelf. Ice ablates at the surface, as the ice shelf continues to build itself from below. The incongruous sponge at the surface may have arrived at its unlikely destination through such a process. “That process of ‘freezing on’ is very relevant to these other ice shelves,” Schmidt explained. “We’re trying to figure out what kind of signal you might see in the upper ice [to explain] what’s going on down in the ocean – how these two interact.” New AUV represents leap forward in under-ice explorationGeorgia Tech has developed a $400,000 autonomous underwater vehicle called Icefin to investigate the water environment below the McMurdo Ice Shelf. 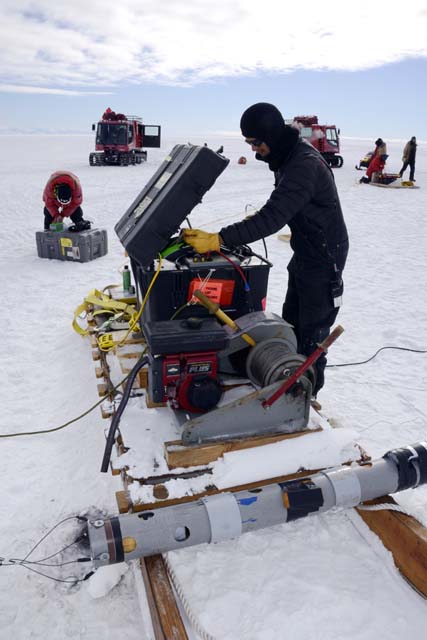
Photo Credit: Peter Rejcek
Engineer Laughlin Barker prepares SCINI for deployment down the borehole.
Sleek like a black torpedo, the three-meter-long robot carries a host of sensors and instruments aboard its frame including cameras, sonars, a current profiler and a CTD (conductivity, temperature and depth) profiler, among other devices. “It’s a lot of science on one vehicle. It’s the smallest vehicle that does all that stuff, at least with high-powered versions of all that instrumentation,” Schmidt said. The job of squeezing all of those tools into one self-propelled toolbox fell to Michael “Mick” West, a senior research engineer at Georgia Tech Research Institute. Development of Icefin began as a classroom project, according to West. “Some of the ideas that we ultimately came up came from students,” he noted. West has been developing AUVs for the better part of 15 years. However, for most of those projects, size was never a factor because the robots are usually deployed off ships in the open ocean, not through a hole in the ice. “There are all sorts of design challenges with going underneath the ice,” West said. Navigation is one problem. GPS doesn’t work under the water, let alone below many meters of ice cover. How to enable Icefin to navigate under the ice on its programming? The problem is called simultaneous localization and mapping, or SLAM, for mapping an unknown environment while keeping track of its location at the same time. In this case, West’s team is using the ice to its advantage by programming Icefin to create a map of the topography under the ice shelf using its camera and sonar as it flies through the water. “You’re basically building your own constellation of GPS and mapping those features inside your map,” West explained. “You can then map to those features.” |

For USAP Participants |
For The Public |
For Researchers and EducatorsContact UsU.S. National Science FoundationOffice of Polar Programs Geosciences Directorate 2415 Eisenhower Avenue, Suite W7100 Alexandria, VA 22314 Sign up for the NSF Office of Polar Programs newsletter and events. Feedback Form |

