Page 2/2 - Posted November 26, 2014
Last hurrah for NSF-funded SCINI robot under the iceIcefin is expected to make its debut sometime this field season, making the plunge down through at least one of six planned sites on the McMurdo Ice Shelf. However, at what the team has dubbed Delta site, where Duling and company spent the better part of 36 hours melting snow and ice, the plan is to send SCINI down the borehole. SCINI, for Submersible Capable of under-Ice Navigation and Imaging, is the little ROV (remotely operated vehicle) that could. About half the length of Icefin, SCINI was originally developed under a grant from the National Science Foundation to Stacy Kim, a benthic ecologist at Moss Landing Marine Laboratories. SCINI is sort of the scout of the ROV world. It is relatively lightweight, with minimal gear, unlike Icefin. It was designed to dive down as deep as 300 meters to the seafloor under sea ice where divers can’t go. Kim wanted to see what marine critters lived in the deep of McMurdo Sound. 
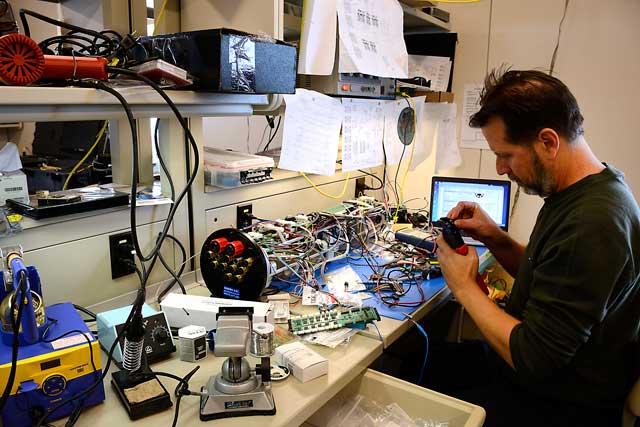
Photo Credit: Peter Rejcek
Britney Schmidt looks at the underwater video stream from SCINI, which Laughlin Barker pilots using a video game controller.
SCINI did that and more over the last seven years. In 2010, while skimming along the bottom of the Ross Ice Shelf during an unrelated project, the ROV spied a new species of sea anemone living on the underside of the ice. And on what appears to be one of its last missions before being retired at the end of the 2014-15 season – “It’s done its job. For a little ROV, seven years is a long run,” Kim noted – ROV pilot and technician Laughlin Barker spied a small squid along the underside of the ice shelf. Exclamations of surprise and excitement filled the small command center, consisting of a couple of laptops and a flat-screen monitor on a fold-out table, with black plastic wrapped overhead to shield out the 24-hour daylight coming through the large expedition tent. Almost as amazing as finding life so far underneath an ice shelf was the topography of the ice itself. SCINI’s camera showed a matrix of ice crystals that might have been mistaken for some rugged alien terrain. “It’s like flying through mountains,” Barker said. Added Schmidt, “The topography is totally amazing.” Going where no one has gone beforeIn part, Icefin’s basic design was based on the SCINI model. Kim said it’s gratifying that the work her teams have done over the years had advanced research and instrumentation. 
Photo Credit: Peter Rejcek
One of the team's field camps on the McMurdo Ice Shelf.
“It’s exciting, because there’s a proliferation [of these robots]. I’m happy to see this kind of thing is growing,” she said. “Most of the vehicles have been survey-type vehicles. Hopefully, someone will take the next step and build out something that is more manipulator/experiment friendly.” Enter Artemis. Artemis is another autonomous underwater vehicle under development by the SIMPLE project. It is being built by Stone Aerospace, a company that also designed ENDURANCE, a robot used to explore the ice-covered lakes of the McMurdo Dry Valleys several years ago. Named after the Greek goddess of hunting, Artemis will be armed with a vast suite of scientific instruments to characterize the water, ice and any microbiology found within and below the ice. The list of equipment is impressive: a CTD, acoustic Doppler current profiler, mapping and profiling sonars, imaging, HD video, a science tower with various sensors for water chemistry, as well as a water sampler and a protein fluorescence spectrometer to test for microbiological communities within and on the ice. 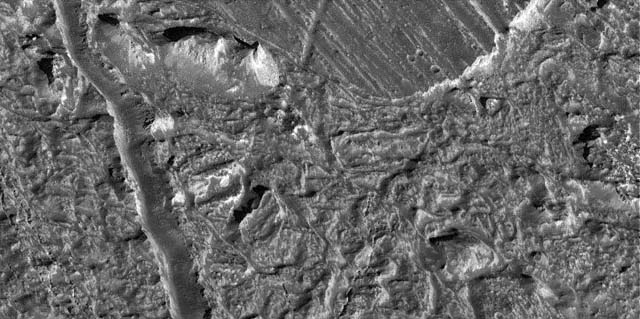
Photo Credit: NASA/JPL
The "chaos terrain" on Europa.
It will be capable of diving a kilometer deep. More importantly, it will be able to range as far as 15 kilometers, allowing scientists to release it from the ice edge directly into the ocean beginning in 2015-16. This year, the Georgia Tech team is also collaborating with scientists and engineers from the University of Texas’ Institute for Geophysics. The UT group is scheduled to fly over the ice shelf with a special aircraft-mounted radar system that will attempt to characterize the same water-ice boundary layer as the robots in the sea. Schmidt said it is important that the datasets between the AUVs and the airborne instrument match up well, with the robots below the ice shelf providing ground-truth for the system aboard the Twin Otter aircraft. “That is really relevant to exploring Europa because that radar instrument is going on the next mission to Europa,” she explained. The mission, Europa Clipper, appears to be the leading candidate for NASA’s first major expedition to Jupiter’s sixth moon. The $2.5 billion reconnaissance mission would place a spacecraft in orbit around Jupiter. It would potentially carry radar instruments like the one being tested in Antarctica to study the moon’s ice shell. “Our goal is to do enough science with those instruments [on Europa Clipper] that we can then send a spacecraft that could potentially land and drill [into the ice shell] or land and melt in a probe,” Schmidt said. “We can land and do this in my lifetime.” |

For USAP Participants |
For The Public |
For Researchers and EducatorsContact UsU.S. National Science FoundationOffice of Polar Programs Geosciences Directorate 2415 Eisenhower Avenue, Suite W7100 Alexandria, VA 22314 Sign up for the NSF Office of Polar Programs newsletter and events. Feedback Form |